|
IMPaSTo: A
Realistic, Interactive Model for Paint |
|
William
Baxter, Jeremy Wendt, and Ming C. Lin Department of Computer Science
University of North Carolina at Chapel Hill {baxter,jwendt,lin}@cs.unc.edu
http://gamma.cs. unc.edu/IMPaSTo/ |
|
Abstract |
|
We
present a paint model for use in interactive painting systems that captures a
wide range of styles similar to oils or acrylics. The model includes both a
numerical simulation to recreate the physical flow of paint and an optical
model to mimic the paint appearance. Our physical model for
paint is based on a conservative advection scheme that simulates the basic
dynamics of paint, augmented with heuristics that model the remaining key
properties needed for painting. We allow one active wet layer, and an
unlimited number of dry layers, with each layer being represented as a
height-field. We represent paintings
in terms of paint pigments rather than RGB colors, allowing us to relight
paintings under any full-spectrum illuminant. We also incorporate an
interactive implementation of the Kubelka-Munk diffuse reflectance model, and
use a novel eightcomponent color space for greater color accuracy. |
|
We
have integrated our paint model into a prototype painting system, with both
our physical simulation and rendering algorithms running as fragment programs
on the graphics hardware. The system demonstrates the model's effectiveness
in rendering a variety of painting styles from semi-transparent glazes, to scumbling,
to thick impasto. |
|
CR Categories: 1.3.4 [Computing Methodologies]: Computer
Graphics-Graphics Utilities; 1.3.7 [Computing Methodologies]: Computer
Graphics-Three-Dimensional Graphics and Realism |
|
Keywords: Non-photorealistic rendering,
Painting systems, Simulation of traditional graphical styles |
|
1 Introduction |
|
Each
medium used in painting has particular characteristics. Viscous paint media,
such as oil and acrylic, are popular among artists for their versatility and
ability to capture a wide range of expressive styles. They can be applied
thinly in even layers to achieve deep, lustrous finishes as in the work of
Vermeer, or dabbed on thickly to achieve almost sculptural impasto effects,
as in the works of Monet. With a scumbling technique, short choppy
semi-opaque |
|
|

|
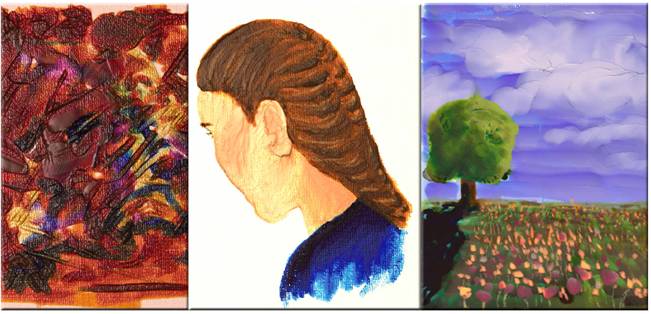
Figure 1: A painting hand-made using
IMPaSTo, after a painting by Edvard Munch. brush strokes create a veil-like haze
over prevIous layers [Gair 1997]. |
|
It is a challenge to design an interactive model that
captures the full range of physical behavior of such paint. Rather than attempt
to simulate paint based on completely accurate physics, we aim instead to
devise approximations which capture the high-order terms, and include
heuristics which model the desired empirical behaviors not captured by the
physical terms. Paint is made by mixing
finely ground pigments with a vehicle. Linseed oil is the
vehicle typically used in oil paints, while in acrylics it is a polymer
emulsion. Both of these are non-Newtonian fluids, and as such, are difficult
to model mathematically. Basic properties of non-Newtonian fluids, like
viscosity, change depending on factors like shear-rate1• Furthermore, the key
feature of interest in painting is how these fluids interact with the
complex, rough surfaces of the canvas and brush, which means the mathematics
must deal with geometrically complex moving boundary conditions and free
surface effects. Finally, in addition to these challenges, a rough
calculation shows the effective resolution of real paint is at least 250 DPI2,
and real paintings often measure many square feet in size. |
|
Paint also features many stunning optical properties. The
observed reflectance spectrum of a paint is due to a complex subsurface scat-
|
|
1The best-known example
of this is ketchup, in which viscosity reduces under high shear rate, e.g.,
when shaken. 2Strokes often exhibit fine scale features on the order of
the width of a single bristle. A typical hair is about 80 microns wide, which
translates to a bare minimal resolution of at least 250 dots per inch (DPI),
and probably 500 DPI or more to ensure an adequate Nyquist sampling rate. |