Appendix D Examples
This appendix provides a variety of VRML examples.
This example contains a simple scene defining a view of a red sphere
and a blue box, lit by a directional light:
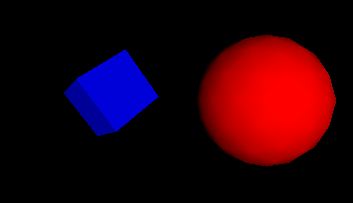
Figure D-1: Red sphere meets blue box
#VRML V2.0 utf8
Transform {
children [
NavigationInfo { headlight FALSE } # We'll add our own light
DirectionalLight { # First child
direction 0 0 -1 # Light illuminating the scene
}
Transform { # Second child - a red sphere
translation 3 0 1
children [
Shape {
geometry Sphere { radius 2.3 }
appearance Appearance {
material Material { diffuseColor 1 0 0 } # Red
}
}
]
}
Transform { # Third child - a blue box
translation -2.4 .2 1
rotation 0 1 1 .9
children [
Shape {
geometry Box {}
appearance Appearance {
material Material { diffuseColor 0 0 1 } # Blue
}
}
]
}
] # end of children for world
}
Click here to view this example in
a VRML browser.
Reading the following file results in three spheres being drawn. The
first sphere defines a unit sphere at the origin named "Joe",
the second sphere defines a smaller sphere translated along the +x axis,
the third sphere is a reference to the second sphere and is translated
along the -x axis. If any changes occur to the second sphere (e.g. radius
changes), then the third sphere, will change too:
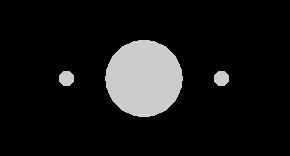
Figure D-2: Instancing
#VRML V2.0 utf8
Transform {
children [
DEF Joe Shape { geometry Sphere {} }
Transform {
translation 2 0 0
children DEF Joe Shape { geometry Sphere { radius .2 } }
}
Transform {
translation -2 0 0
children USE Joe
}
]
}
Click here to view this example in
a VRML browser. (Note that the spheres are unlit because no appearance
was specified.)
A simple table with variable colours for the legs and top might be prototyped
as:
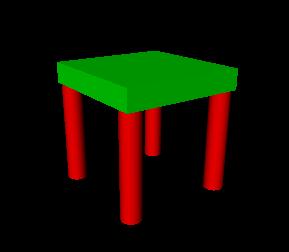
Figure D-3: Prototype
#VRML V2.0 utf8
PROTO TwoColorTable [ field SFColor legColor .8 .4 .7
field SFColor topColor .6 .6 .1 ]
{
Transform {
children [
Transform { # table top
translation 0 0.6 0
children
Shape {
appearance Appearance {
material Material { diffuseColor IS topColor }
}
geometry Box { size 1.2 0.2 1.2 }
}
}
Transform { # first table leg
translation -.5 0 -.5
children
DEF Leg Shape {
appearance Appearance {
material Material { diffuseColor IS legColor }
}
geometry Cylinder { height 1 radius .1 }
}
}
Transform { # another table leg
translation .5 0 -.5
children USE Leg
}
Transform { # another table leg
translation -.5 0 .5
children USE Leg
}
Transform { # another table leg
translation .5 0 .5
children USE Leg
}
] # End of root Transform's children
} # End of root Transform
} # End of prototype
# The prototype is now defined. Although it contains a
# number of nodes, only the legColor and topColor fields
# are public. Instead of using the default legColor and
# topColor, this instance of the table has red legs and
# a green top:
TwoColorTable {
legColor 1 0 0 topColor 0 1 0
}
NavigationInfo { type "EXAMINE" } # Use the Examine viewer
Click here to view this example in
a VRML browser.
This Script node decides whether or not to open a bank vault given openVault
and combinationEntered messages. To do this, it remembers whether or not
the correct combination has been entered. The Script node combined with
a Sphere, a TouchSensor and a Sound node to show how is works. When the
pointing device is over the sphere, the combinationEntered eventIn
of the Script is sent. Then, when the Sphere is touched (typically when
the mouse button is pressed) the Script is sent the openVault eventIn.
This generates the vaultUnlocked eventOut which starts a 'click'
sound. Here is the example:
#VRML V2.0 utf8
DEF OpenVault Script {
# Declarations of what's in this Script node:
eventIn SFTime openVault
eventIn SFBool combinationEntered
eventOut SFTime vaultUnlocked
field SFBool unlocked FALSE
# Implementation of the logic:
url "javascript:
function combinationEntered(value) { unlocked = value; }
function openVault(value) {
if (unlocked) vaultUnlocked = value;
}"
}
Shape {
appearance Appearance {
material Material { diffuseColor 1 0 0 }
}
geometry Sphere { }
}
Sound {
source DEF Click AudioClip {
url "click.wav"
stopTime 1
}
minFront 1000
maxFront 1000
minBack 1000
maxBack 1000
}
DEF TS TouchSensor { }
ROUTE TS.isOver TO OpenVault.combinationEntered
ROUTE TS.touchTime TO OpenVault.openVault
ROUTE OpenVault.vaultUnlocked TO Click.startTime
Note that the openVault eventIn and the vaultUnlocked
eventOut are of type SFTime, which alls them to be wired directly to a
TouchSensor or TimeSensor.
Click here to view this example in
a VRML browser.
The following IndexedFaceSet (contained in a Shape node) uses all four
of the geometric property nodes to specify vertex coordinates, colours
per vertex, normals per vertex, and texture coordinates per vertex (note
that the material sets the overall transparency):
#VRML V2.0 utf8
Shape {
geometry IndexedFaceSet {
coordIndex [ 0, 1, 3, -1, 0, 2, 3, -1 ]
coord Coordinate {
point [ 0 0 0, 1 0 0, 1 0 -1, 0.5 1 0 ]
}
color Color {
color [ 0.2 0.7 0.8, 0.5 0 0, 0.1 0.8 0.1, 0 0 0.7 ]
}
normal Normal {
vector [ 0 0 1, 0 0 1, 0 0 1, 0 0 1 ]
}
texCoord TextureCoordinate {
point [ 0 0, 1 0, 1 0.4, 1 1 ]
}
}
appearance Appearance {
material Material { transparency 0.5 }
texture PixelTexture {
image 2 2 1 0xFF 0x80 0x80 0xFF
}
}
}
Click here to view this example in
a VRML browser.
VRML 2.0 has the capability to define new nodes. The following
is an example of a new node RefractiveMaterial. This node behaves as a
Material node with an added field, indexOfRefraction. The list
of URLs for the EXTERNPROTO are searched in order. If the browser recognizes
the URN, urn:inet:foo.com:types:RefractiveMaterial,
it may treat it as a native type (or load the implementation). Otherwise,
the URL, http://www.myCompany.com/vrmlNodes/RefractiveMaterial.wrl,
is used as a backup to ensure that the node is supported on any browsers.
See below for the PROTO implementation that treats RefractiveMaterial
as a Material (and ignores the refractiveIndex field).
#VRML V2.0 utf8
# external protype definition
EXTERNPROTO RefractiveMaterial [
exposedField SFFloat ambientIntensity
exposedField SFColor diffuseColor
exposedField SFColor specularColor
exposedField SFColor emissiveColor
exposedField SFFloat shininess
exposedField SFFloat transparency
exposedField SFFloat indexOfRefraction ]
[
"urn:inet:foo.com:types:RefractiveMaterial",
"http://www.myCompany.com/vrmlNodes/RefractiveMaterial.wrl",
"refractivematerial.wrl",
]
Shape {
geometry Sphere { }
appearance Appearance {
# Instance of a RefractiveMaterial
material RefractiveMaterial {
ambientIntensity 0.2
diffuseColor 1 0 0
indexOfRefraction 0.3
}
}
}
The URL http://www.myCompany.com/vrmlNodes/RefractiveMaterial.wrl
contains the following:
#VRML V2.0 utf8
PROTO RefractiveMaterial [ # prototype definition
exposedField SFFloat ambientIntensity 0
exposedField SFColor diffuseColor 0.5 0.5 0.5
exposedField SFColor specularColor 0 0 0
exposedField SFColor emissiveColor 0 0 0
exposedField SFFloat shininess 0
exposedField SFFloat transparency 0
exposedField SFFloat indexOfRefraction 0.1 ]
{
Material {
ambientIntensity IS ambientIntensity
diffuseColor IS diffuseColor
specularColor IS specularColor
emissiveColor IS emissiveColor
shininess IS shininess
transparency IS transparency
}
}
Note that the name of the new node type, RefractiveMaterial,
is not used by the browser to decide if the node is native or not; the
URL/URN names determine the node's implementation.
Click here to view this example in
a VRML browser.
The target parameter can be used by the anchor node to send a
request to load a URL into another frame:
Anchor {
url "http://somehost/somefile.html"
parameter [ "target=name_of_frame" ]
children Shape { geometry Cylinder {} }
}
An Anchor may be used to bind the viewer to a particular viewpoint
in a virtual world by specifying a URL ending with #viewpointName,
where viewpointName is the DEF name of a viewpoint defined in the
world. For example:
Anchor {
url "http://www.school.edu/vrml/someScene.wrl#OverView"
children Shape { geometry Box {} }
}
specifies an anchor that puts the viewer in the someScene world
bound to the viewpoint named OverView when the box is chosen (note
that OverView is the DEF name of the viewpoint, not the value of
the viewpoint's description field).
If no world is specified, the current scene is implied. For example:
Anchor {
url "#Doorway"
children Shape { geometry Sphere {} }
}
binds the user's view to the viewpoint with the DEF name Doorway
in the current scene.
A directional light source illuminates only the objects in its enclosing
grouping node. The light illuminates everything within this coordinate
system including the objects that precede it in the scene graph as shown
below:
#VRML V2.0 utf8
Group {
children [
DEF UnlitShapeOne Transform {
translation -3 0 0
children Shape {
appearance DEF App Appearance {
material Material {
diffuseColor 0.8 0.4 0.2
}
}
geometry Box { }
}
}
DEF LitParent Group {
children [
DEF LitShapeOne Transform {
translation 0 2 0
children Shape {
appearance USE App
geometry Sphere { }
}
}
# lights the shapes under LitParent
DirectionalLight { }
DEF LitShapeTwo Transform {
translation 0 -2 0
children Shape {
appearance USE App
geometry Cylinder { }
}
}
]
}
DEF UnlitShapeTwo Transform {
translation 3 0 0
children Shape {
appearance USE App
geometry Cone { }
}
}
]
}
Click here to view this example in
a VRML browser.
This simple example defines a PointSet composed of 3 points. The first
point is red (1 0 0), the second point is green (0 1 0), and the third
point is blue (0 0 1). The second PointSet instances the Coordinate node
defined in the first PointSet, but defines different colours:
#VRML V2.0 utf8
Shape {
geometry PointSet {
coord DEF mypts Coordinate {
point [ 0 0 0, 2 2 2, 3 3 3 ]
}
color Color { color [ 1 0 0, 0 1 0, 0 0 1 ] }
}
}
Transform {
translation 2 0 0
children Shape {
geometry PointSet {
coord USE mypts
color Color { color [ .5 .5 0, 0 .5 .5, 1 1 1 ] }
}
}
}
Click here to view this example in
a VRML browser.
The LOD node is typically used for switching between different versions
of geometry at specified distances from the viewer. However, if the range
field is left at its default value, the browser selects the most appropriate
child from the list given. It can make this selection based on performance
or perceived importance of the object. Children should be listed with
most detailed version first just as for the normal case. This "performance
LOD" feature can be combined with the normal LOD function to give
the browser a selection of children from which to choose at each distance.
In this example, the browser is free to choose either a detailed or
a less-detailed version of the object when the viewer is closer than 10
meters (as measured in the coordinate space of the LOD). The browser should
display the less detailed version of the object if the viewer is between
10 and 50 meters and should display nothing at all if the viewer is farther
than 50 meters. Browsers should try to honor the hints given by authors,
and authors should try to give browsers as much freedom as they can to
choose levels of detail based on performance.
#VRML V2.0 utf8
LOD {
range [ 10, 50 ]
level [
LOD {
level [
Shape { geometry Sphere { } }
DEF LoRes Shape { geometry Box { } }
]
}
USE LoRes,
Shape { } # Display nothing
]
}
For best results, ranges should be specified only where necessary and
LOD nodes should be nested with and without ranges.
Click here to view this example in
a VRML browser.
This example interpolates from red to green to blue in a 10 second cycle:
#VRML V2.0 utf8
DEF myColor ColorInterpolator {
key [ 0.0, 0.5, 1.0 ]
keyValue [ 1 0 0, 0 1 0, 0 0 1 ] # red, green, blue
}
DEF myClock TimeSensor {
cycleInterval 10.0 # 10 second animation
loop TRUE # infinitely cycling animation
}
Shape {
appearance Appearance {
material DEF myMaterial Material { }
}
geometry Sphere { }
}
ROUTE myClock.fraction_changed TO myColor.set_fraction
ROUTE myColor.value_changed TO myMaterial.set_diffuseColor
Click here to view this example in
a VRML browser.
The TimeSensor is very flexible. The following are some of the many
ways in which it can be used:
- a TimeSensor can be triggered to run continuously by setting cycleInterval
> 0, and loop = TRUE, and then routing a time output from
another node that triggers the loop (e. g., the touchTime
eventOut of a TouchSensor can be routed to the TimeSensor's startTime
to start the TimeSensor running).
- a TimeSensor can be made to run continuously upon reading by setting
cycleInterval > 0, startTime > 0, stopTime
= 0, and loop = TRUE.
The first example animates a box when the user clicks on it:
#VRML V2.0 utf8
DEF XForm Transform {
children [
Shape {
appearance Appearance {
material Material { diffuseColor 1 0 0 }
}
geometry Box {}
}
DEF Clicker TouchSensor {}
# Run once for 2 sec.
DEF TimeSource TimeSensor { cycleInterval 2.0 }
# Animate one full turn about Y axis:
DEF Animation OrientationInterpolator {
key [ 0, .33, .66, 1.0 ]
keyValue [ 0 1 0 0, 0 1 0 2.1, 0 1 0 4.2, 0 1 0 0 ]
}
]
}
Click here to view this example
in a VRML browser.
The second example plays Westminster Chimes once an hour:
#VRML V2.0 utf8
Group {
children [
DEF Hour TimeSensor {
loop TRUE
cycleInterval 3600.0 # 60*60 seconds == 1 hour
}
Sound {
source DEF Sounder AudioClip {
url "http://...../westminster.mid" }
}
}
]
}
ROUTE Hour.cycleTime TO Sounder.startTime
Shuttles and pendulums are great building blocks for composing interesting
animations. This shuttle translates its children back and forth along
the X axis, from -1 to 1 (by default). The distance field can be
used to change this default. The pendulum rotates its children about the
Z axis, from 0 to 3.14159 radians and back again (by default). The maxAngle
field can be used to change this default.
#VRML V2.0 utf8
PROTO Shuttle [
field SFTime rate 1
field SFFloat distance 1
field MFNode children [ ]
exposedField SFTime startTime 0
exposedField SFTime stopTime 0
field SFBool loop TRUE
] {
DEF F Transform { children IS children }
DEF T TimeSensor {
cycleInterval IS rate
startTime IS startTime
stopTime IS stopTime
loop IS loop
}
DEF S Script {
field SFFloat distance IS distance
eventOut MFVec3f position
url "javascript:
function initialize() {
// constructor:setup interpolator,
pos1 = new SFVec3f(-distance, 0, 0);
pos2 = new SFVec3f(distance, 0, 0);
position = new MFVec3f(pos1, pos2, pos1);
}",
}
DEF I PositionInterpolator {
key [ 0, 0.5, 1 ]
keyValue [ -1 0 0, 1 0 0, -1 0 0 ]
}
ROUTE T.fraction_changed TO I.set_fraction
ROUTE I.value_changed TO F.set_translation
ROUTE S.position TO I.set_keyValue
}
PROTO Pendulum [
field SFTime rate 1
field SFFloat maxAngle 3.14159
field MFNode children [ ]
exposedField SFTime startTime 0
exposedField SFTime stopTime 0
field SFBool loop TRUE
] {
DEF F Transform { children IS children }
DEF T TimeSensor {
cycleInterval IS rate
startTime IS startTime
stopTime IS stopTime
loop IS loop
}
DEF S Script {
field SFFloat maxAngle IS maxAngle
eventOut MFRotation rotation
url "javascript:
function initialize() {
// constructor:setup interpolator,
rot1 = new SFRotation(0, 0, 1, 0);
rot2 = new SFRotation(0, 0, 1, maxAngle/2);
rot3 = new SFRotation(0, 0, 1, maxAngle);
rotation = new MFRotation(rot1, rot2, rot3,
rot2, rot1);
}",
}
DEF I OrientationInterpolator {
key [ 0, 0.25, 0.5, 0.75, 1 ]
keyValue [ 0 0 1 0,
0 0 1 1.57,
0 0 1 3.14,
0 0 1 1.57,
0 0 1 0 ]
}
ROUTE T.fraction_changed TO I.set_fraction
ROUTE I.value_changed TO F.set_rotation
ROUTE S.rotation TO I.set_keyValue
}
Transform {
translation -3 0 0
children Pendulum {
rate 3
maxAngle 6.28
children Shape { geometry Cylinder { height 5 } }
}
}
Transform {
translation 3 0 0
children Shuttle {
rate 2
children Shape { geometry Sphere { } }
}
}
Click here to view this example in
a VRML browser.
These nodes can be used to do a continuous animation when loop
is TRUE. When loop is FALSE they can perform a single cycle under
control of the startTime and stopTime fields. The rate
field controls the speed of the animation. The children field holds
the children to be animated.
This example is a simple implementation of a robot. This robot has very
simple body parts: a cube for his head, a sphere for his body and cylinders
for arms (he hovers so he has no feet!). He is something of a sentry--he
walks forward and walks back across a path. He does this whenever the
viewer is near. This makes use of the Shuttle and Pendulum of D.14.
#VRML V2.0 utf8
EXTERNPROTO Shuttle [
field SFTime rate
field SFFloat distance
field MFNode children
exposedField SFTime startTime
exposedField SFTime stopTime
field SFBool loop
] "exampleD.14.wrl#Shuttle"
EXTERNPROTO Pendulum [
field SFTime rate
field SFFloat maxAngle
field MFNode children
exposedField SFTime startTime
exposedField SFTime stopTime
field SFBool loop
] exampleD.14.wrl#Pendulum
Viewpoint {
position 0 0 150
}
DEF Near ProximitySensor { size 200 200 200 }
DEF Walk Shuttle {
stopTime 1
rate 10
distance 20
children [
# The Robot
Transform {
rotation 0 1 0 1.57
children [
Shape {
appearance DEF A Appearance {
material Material {
diffuseColor 0 0.5 0.7
}
}
geometry Box { } # head
}
Transform {
scale 1 5 1
translation 0 -5 0
children Shape {
appearance USE A
geometry Sphere { }
} # body
}
Transform {
rotation 0 1 0 1.57
translation 1.5 0 0
children DEF Arm Pendulum {
stopTime 1
rate 1
maxAngle 0.52 # 30 degrees
children [
Transform {
translation 0 -3 0
children Shape {
appearance USE A
geometry Cylinder {
height 4
radius 0.5
}
}
}
]
}
}
# duplicate arm on other side and flip so
# it swings in opposition
Transform {
rotation 0 -1 0 1.57
translation -1.5 0 0
children USE Arm
}
]
}
]
}
ROUTE Near.enterTime TO Walk.startTime
ROUTE Near.enterTime TO Arm.startTime
ROUTE Near.exitTime TO Walk.stopTime
ROUTE Near.exitTime TO Arm.stopTime
Click here to view this example in
a VRML browser.
Move closer to the robot to start the animation.
This example of a helicopter demonstrates how to do simple animation
triggered by a TouchSensor. It uses an EXTERNPROTO to include a Rotor
node from the Internet which does the actual animation.
#VRML V2.0 utf8
EXTERNPROTO Rotor [
field SFTime rate
field MFNode children
exposedField SFTime startTime
exposedField SFTime stopTime
]
rotor.wrl:
#VRML V2.0 utf8
PROTO Chopper [
field SFTime rotorSpeed 1
] {
Group {
children [
DEF Touch TouchSensor { } # Gotta get touch events
Inline { url "chopperbody.wrl" }
DEF Top Rotor {
# initially, the rotor should not spin
stopTime 1
rate IS rotorSpeed
children Inline { url "chopperrotor.wrl" }
}
]
}
DEF RotorScript Script {
eventIn SFTime startOrStopEngine
eventOut SFTime startEngine
eventOut SFTime stopEngine
field SFBool engineStarted FALSE
url "javascript:
function startOrStopEngine(value) {
// start or stop engine:
if (!engineStarted) {
startEngine = value;
engineStarted = TRUE;
}
else {
stopEngine = value;
engineStarted = FALSE;
}
}"
}
ROUTE Touch.touchTime TO RotorScript.startOrStopEngine
ROUTE RotorScript.startEngine TO Top.startTime
ROUTE RotorScript.stopEngine TO Top.stopTime
}
Viewpoint { position 0 0 5 }
DEF MyScene Group {
children DEF MikesChopper Chopper { }
}
Click here to view this example in
a VRML browser.
VRML provides control of the viewer's camera through use of a script.
This is useful for things such as guided tours, merry-go-round rides,
and transportation devices such as buses and elevators. These next two
examples show a couple of ways to use this feature.
This example is a simple guided tour through the world. Upon entry,
a guide orb hovers in front of the viewer. Click on this and a tour through
the world begins. The orb follows the user around on his tour. A ProximitySensor
ensures that the tour is started only if the user is close to the initial
starting point. Note that this is done without scripts thanks to the touchTime
output of the TouchSensor.
#VRML V2.0 utf8
Group {
children [
Transform {
translation 0 -1 0
children Shape {
appearance Appearance {
material Material { }
}
geometry Box { size 30 0.2 30 }
}
}
Transform {
translation -1 0 0
children Shape {
appearance Appearance {
material Material {
diffuseColor 0.5 0.8 0
}
}
geometry Cone { }
}
}
Transform {
translation 1 0 0
children Shape {
appearance Appearance {
material Material {
diffuseColor 0 0.2 0.7
}
}
geometry Cylinder { }
}
}
DEF GuideTransform Transform {
children [
DEF TourGuide Viewpoint { jump FALSE },
DEF ProxSensor ProximitySensor { size 50 50 50 }
DEF StartTour TouchSensor { },
Transform {
translation 0.6 0.4 8
children Shape {
appearance Appearance {
material Material {
diffuseColor 1 0.6 0
}
}
geometry Sphere { radius 0.2 }
} # the guide orb
}
]
}
]
}
DEF GuidePI PositionInterpolator {
key [ 0, 0.2, 0.3, 0.5, 0.6, 0.8, 0.9, 1 ]
keyValue [ 0 0 0, 0 0 -5,
2 0 -5, 2 6 -15
-4 6 -15, -4 0 -5,
0 0 -5, 0 0 0
]
}
DEF GuideRI OrientationInterpolator {
key [ 0, 0.2, 0.3, 0.5, 0.6, 0.8, 0.9, 1 ]
keyValue [ 0 1 0 0, 0 1 0 0,
0 1 0 1.2, 0 1 0 3,
0 1 0 3.5, 0 1 0 5,
0 1 0 0, 0 1 0 0,
]
}
DEF TS TimeSensor { cycleInterval 30 } # 60 second tour
ROUTE ProxSensor.isActive TO StartTour.set_enabled
ROUTE StartTour.touchTime TO TS.startTime
ROUTE TS.isActive TO TourGuide.set_bind
ROUTE TS.fraction_changed TO GuidePI.set_fraction
ROUTE TS.fraction_changed TO GuideRI.set_fraction
ROUTE GuidePI.value_changed TO GuideTransform.set_translation
ROUTE GuideRI.value_changed TO GuideTransform.set_rotation
Click here to view this example in
a VRML browser.
This is another example of animating the camera by depicting an elevator
to ease access to a multi-storey building. For this example, a 2 storey
building is shown and it is assumed that the elevator is already at the
ground floor. To go up, the user just steps onto the elevator platform.
A ProximitySensor fires and starts the elevator up automatically. Additional
features such as call buttons for outside the elevator, elevator doors,
and floor selector buttons could be added to make the elevator easier
to use.
#VRML V2.0 utf8
Transform {
translation 0 0 -3.5
children Shape {
appearance Appearance {
material Material {
diffuseColor 0 1 0
}
}
geometry Cone { }
}
}
Transform {
translation 0 4 -3.5
children Shape {
appearance Appearance {
material Material {
diffuseColor 1 0 0
}
}
geometry Cone { }
}
}
Transform {
translation 0 8 -3.5
children Shape {
appearance Appearance {
material Material {
diffuseColor 0 0 1
}
}
geometry Cone { }
}
}
Group {
children [
DEF ETransform Transform {
children [
DEF EViewpoint Viewpoint { jump FALSE }
DEF EProximity ProximitySensor { size 2 5 5 }
Transform {
translation 0 -1 0
children Shape {
appearance Appearance {
material Material { }
}
geometry Box { size 2 0.2 5 }
}
}
]
}
]
}
DEF ElevatorPI PositionInterpolator {
key [ 0, 1 ]
keyValue [ 0 0 0, 0 8 0 ] # a floor is 4 meters high
}
DEF TS TimeSensor { cycleInterval 10 } # 10 second travel time
ROUTE EProximity.enterTime TO TS.startTime
ROUTE TS.isActive TO EViewpoint.set_bind
ROUTE TS.fraction_changed TO ElevatorPI.set_fraction
ROUTE ElevatorPI.value_changed TO ETransform.set_translation
Click here to view this example in
a VRML browser.
|